Wenzhe Tongwenzhet [at] umich.edu I'm a 3rd year robotics PhD student at UMich advised by Prof. Xiaonan Huang and Prof. Maani Ghaffari. I earned my M.S.E in ECE at UMich advised by Prof. Maani Ghaffari. Previously I exchanged at UC Berkeley advised by Prof. Koushil Sreenath. I worked on leash-leaded robotic guide dog in Hybrid Robotics Lab. I love snowboarding 🏂 and film photography 📷 in my free time. CV | GitHub | Google Scholar | LinkedIn |

|
News
|
Research
|
Design of a Variable Stiffness Quasi-Direct Drive Cable-Actuated Tensegrity Robot.Jonathan Mi, Wenzhe Tong, Yilin Ma, Xiaonan Huang RA-L 2025 Paper
|
|
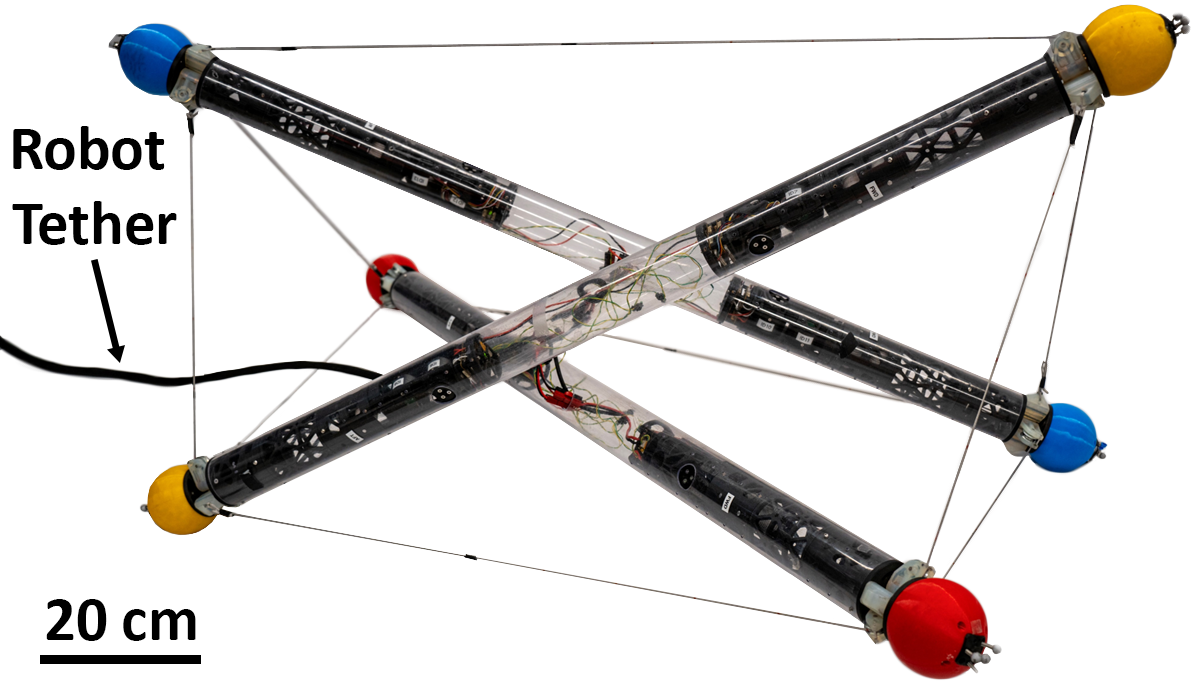
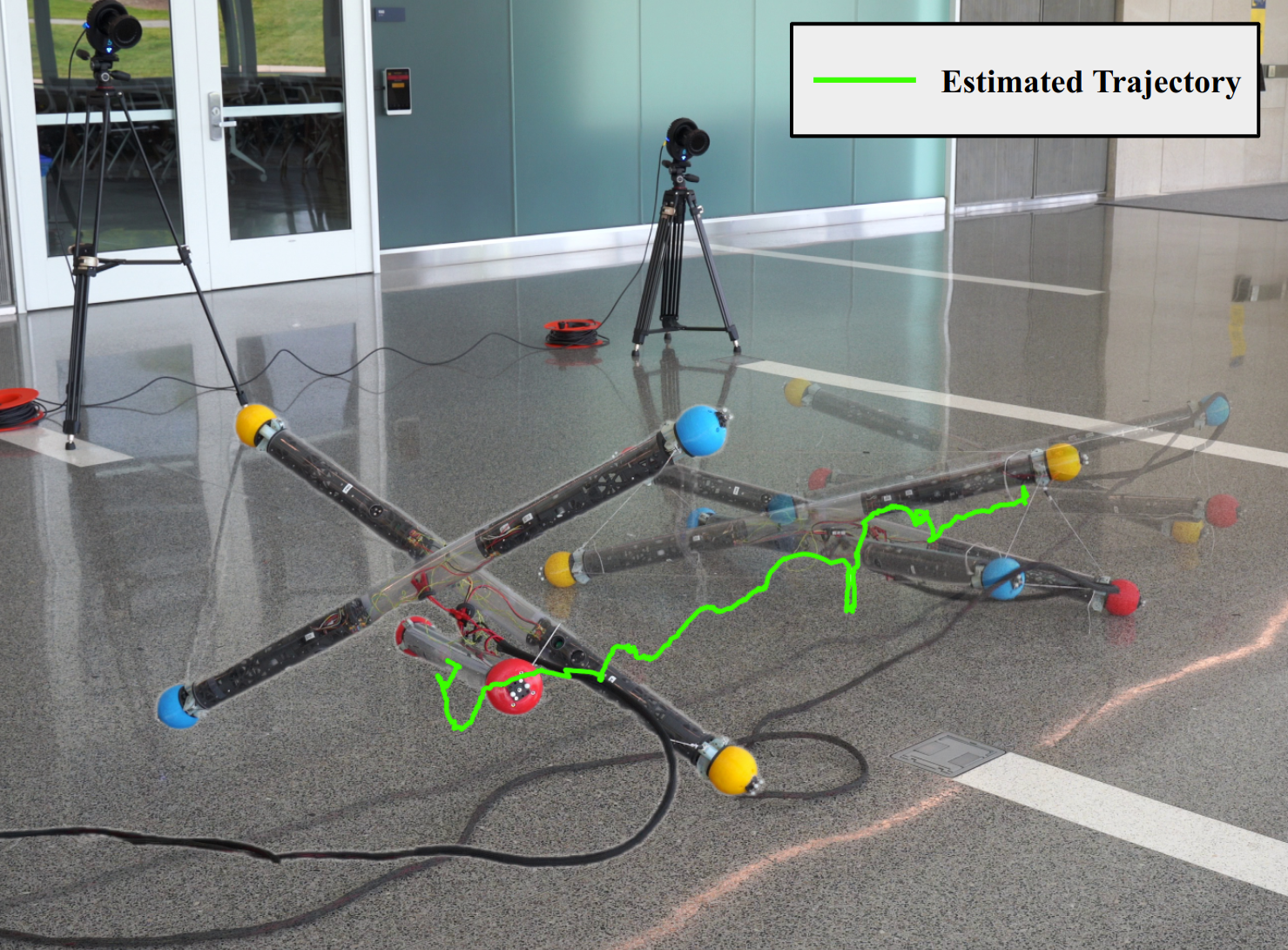
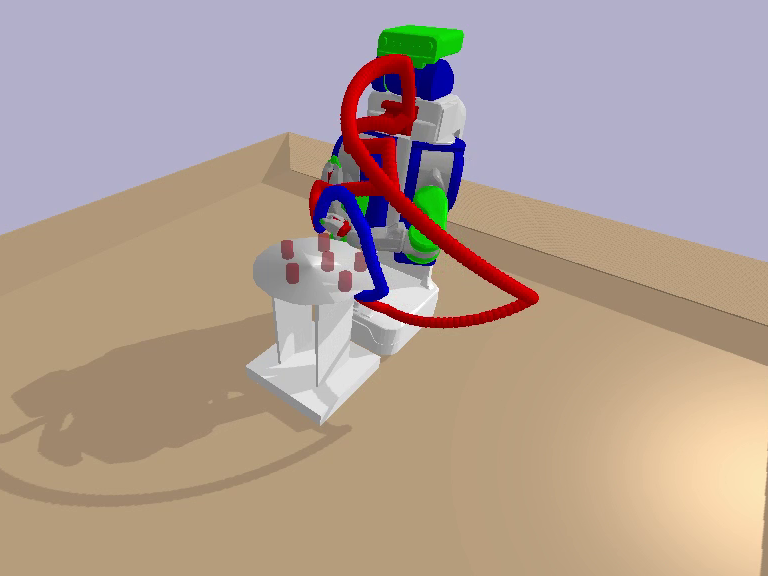
Tensegrity Robot Proprioceptive State Estimation with Geometric Constraints.Wenzhe Tong, Tzu-Yuan Lin, Jonathan Mi, Yicheng Jiang, Maani Ghaffari, Xiaonan Huang RA-L 2025 Paper | Video
|
|
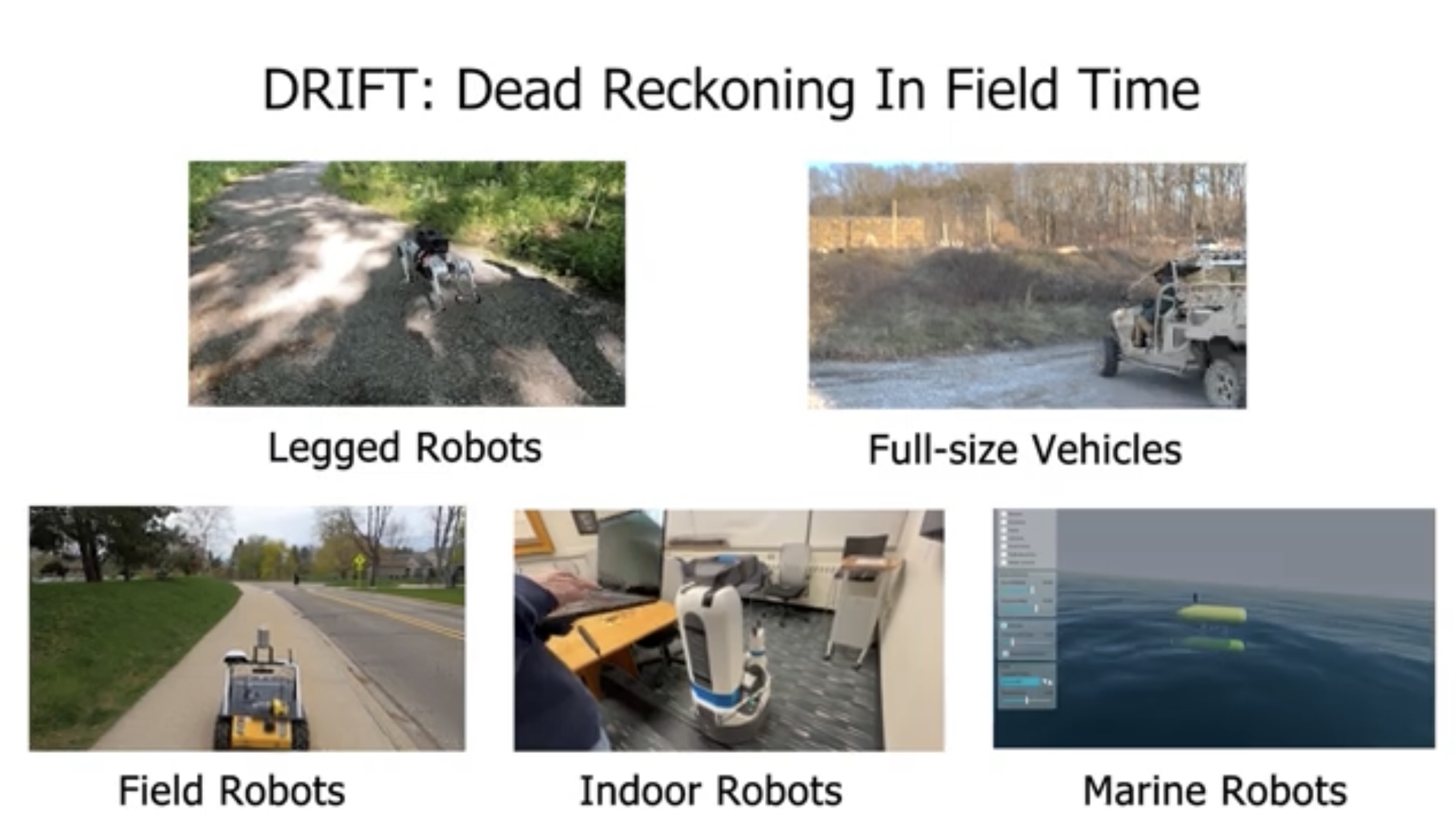
Proprioceptive Invariant Robot State Estimation.Tzu-Yuan Lin, Tingjun Li, Wenzhe Tong, Maani Ghaffari ArXiv 2023 Project page | Paper | Video
|
|
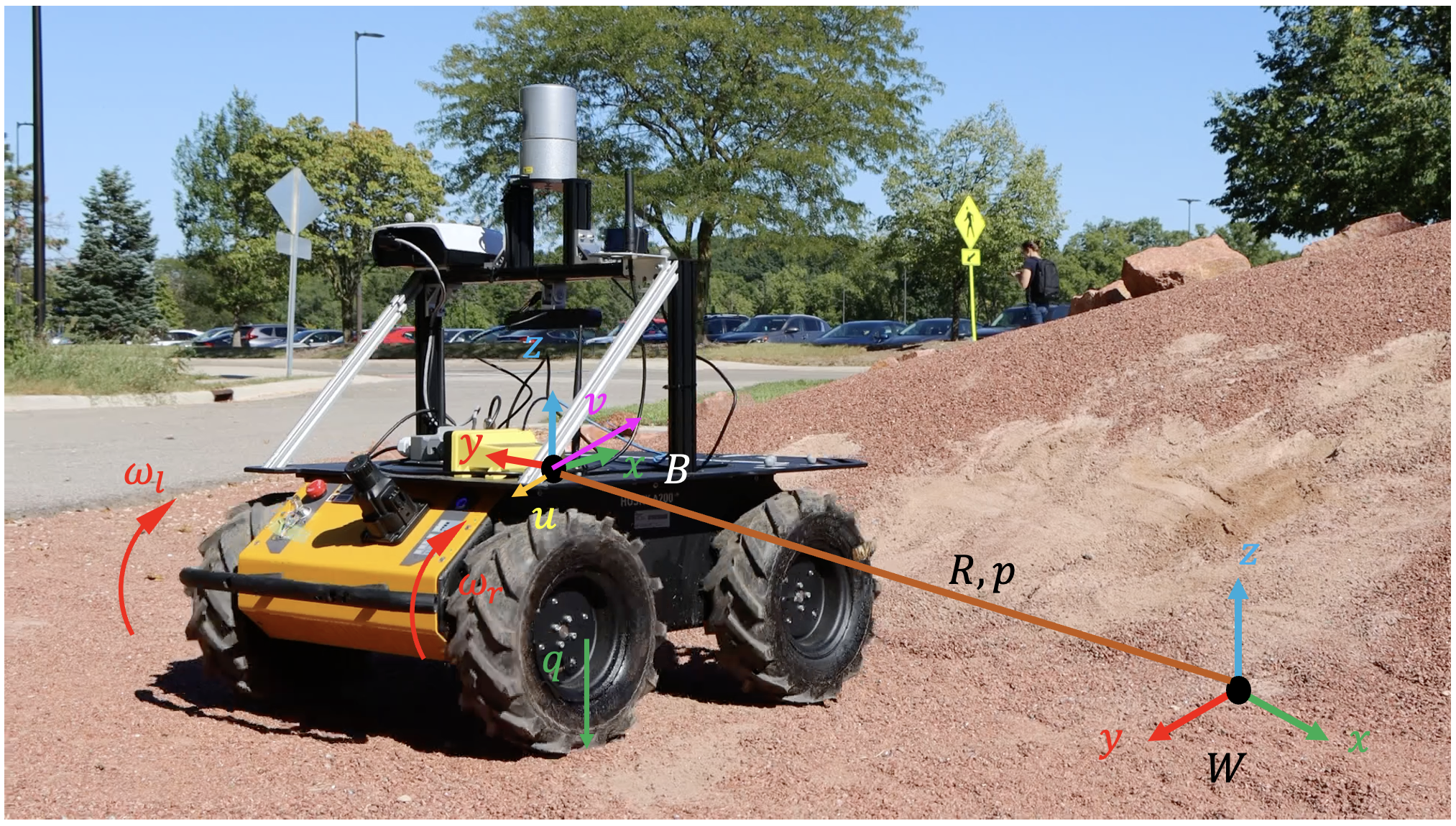
Fully Proprioceptive Slip-Velocity-Aware State Estimation for Mobile Robots via Invariant Kalman Filtering and Disturbance Observer.Xihang Yu, Sangli Teng, Theodor Chakhachiro, Wenzhe Tong, Tingjun Li, Tzu-Yuan Lin, Sarah Koehler, Manuel Ahumada, Jeffrey M. Walls, Maani Ghaffari IROS 2024 Paper | Video
|

|
Robotic Guide Dog: Leading a Human with Leash-Guided Hybrid Physical Interaction.Anxing Xiao*, Wenzhe Tong*, Lizhi Yang*, Jun Zeng, Zhongyu Li, Koushil Sreenath ICRA 2021 | ICRA Best Paper Award Finalist for Service Robotics Paper | Video
|
Course Projects
|
RRT path planning for PR2 robotEECS498-Introduction to Algorithmic Robotics(Fall 2021) Using RRT-connect algorithm to search feasiable path, then shorten and smoothen the path to the target point. |
|
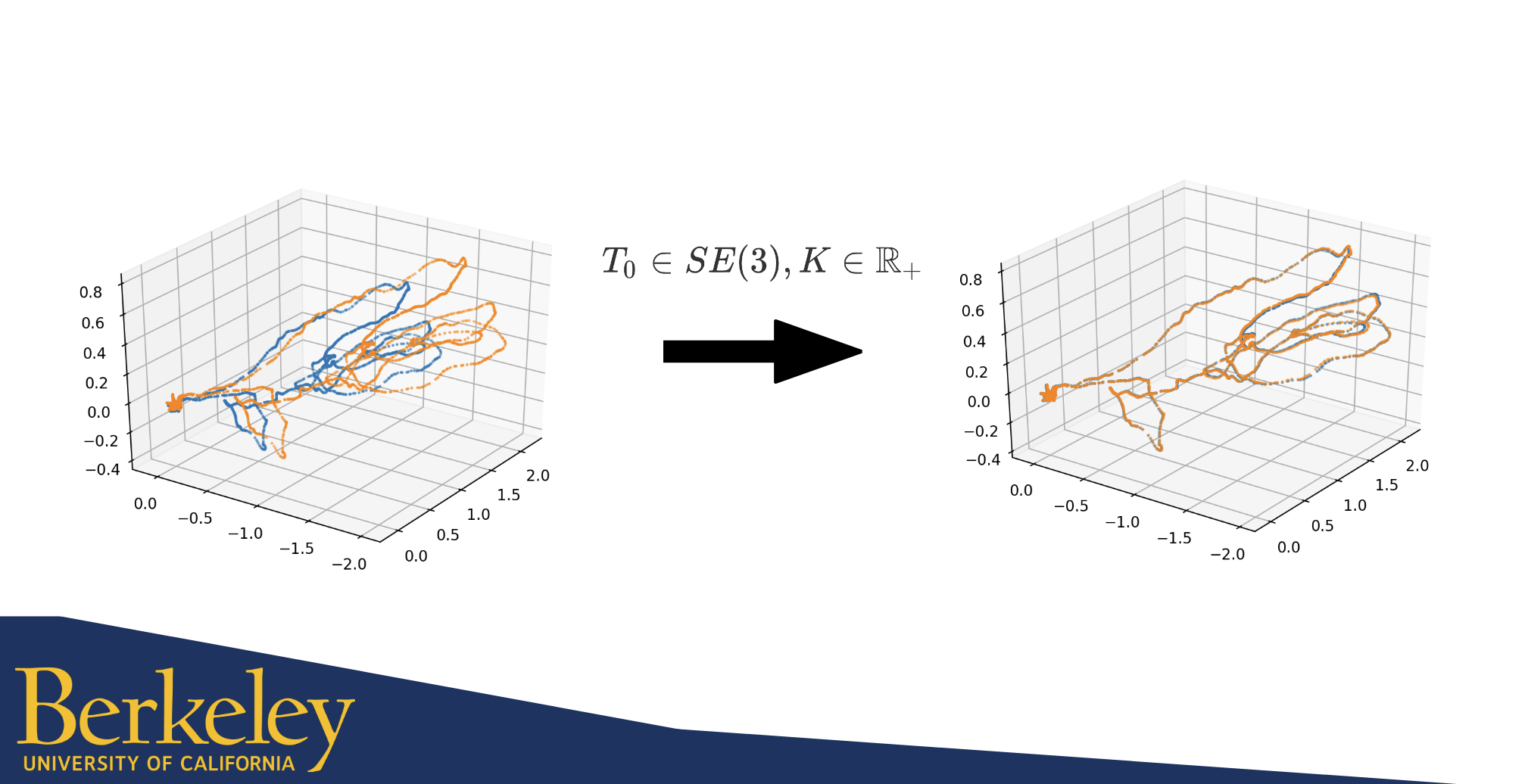
Control, RL, Grasp planning for 7-DOF Baxter robotEECS106B-Robotic manipulator and interaction(Spring 2020) Project page | Video Based on 7-DOF robot Baxter, we designed workspace position, joint angle and joint torque controller for the robot; then using reinforcement learning to get parameters for our controller. Also designed grasping algorithms for bi-finger gripper. |

|
Camera rig offline extrinsic self-calibrationCS294-Geometry and Learning for 3D Vision(Spring 2020) We proposed an extrinsic calibration framework for camera rig(binocular camera). Utilizing the hard constraints of cameras' relative pose to design the optimization problem for extrinsic parameter calibration. |
|
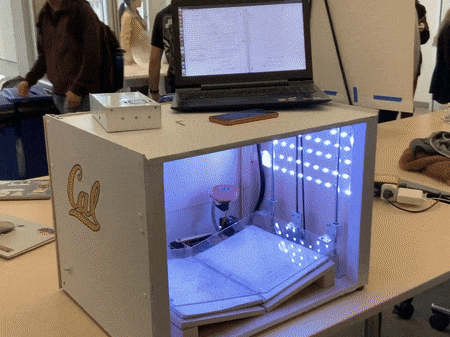
Automatic book scannerME102B-Mechatronics Design(Fall 2019) Video Compelete 3D model design in SolidWorks; manufactured parts of the scanner by 3D printing and laser cutting. Integrated electronics components with proper specifications in the scanner; implemented controller in ROS with camera image processing. |

|
Auto-aiming pellet launcher quadcopterRobomaster Robotics Competetion(2019) Designed and analyzed the light-weight quadcopter structures. Integrated electronical control systems for the payload gimbal. Developed target aiming algorithm framework, including detection and tracking with OpenCV. |
|
Last update: Jan 28th, 2025 |