EECS 106B Project3 Grasping
Contribuator: Wenzhe Tong, Anxing Xiao
Date: Apr 8th, 2020
Tasks
Write metrics to score a grasp
- Resistance of gravity (Done)
- Ferrari Canny (Done)
- Robust Force Closure (Done)
Write our own planner
- Sampling
- Filtering
- Planning
Starter Code
grasping.pyis what you need to modifyutils.pyis utilities functions you can refer and modify- grasping video provided here: Pawn, Nozzle
How to run
- using
condacreate a python3.6 environment cvxpy, scipy, vtkplotter, trimeshpackage needed (see pdf for more info)- Uncomment 2 lines in function
main()to visualize grasp
To be mentioned
- 3rd grasping result of Nozzle is [1 1 1 1 1] instead of [0 0 0 0 0]
Result
Grading Metric:
- Gravity Resistance
- Ferrari-Canny
- Robust Force Closure
We sampling in
| Sampling in R3 | Project to mesh surface |
|---|---|
 |  |
Planning
- Sampling
We first sampling from mesh surface by the functionrandomly_sample_from_meshand pick 2 points, feed it to the filter by distance constraints and so on.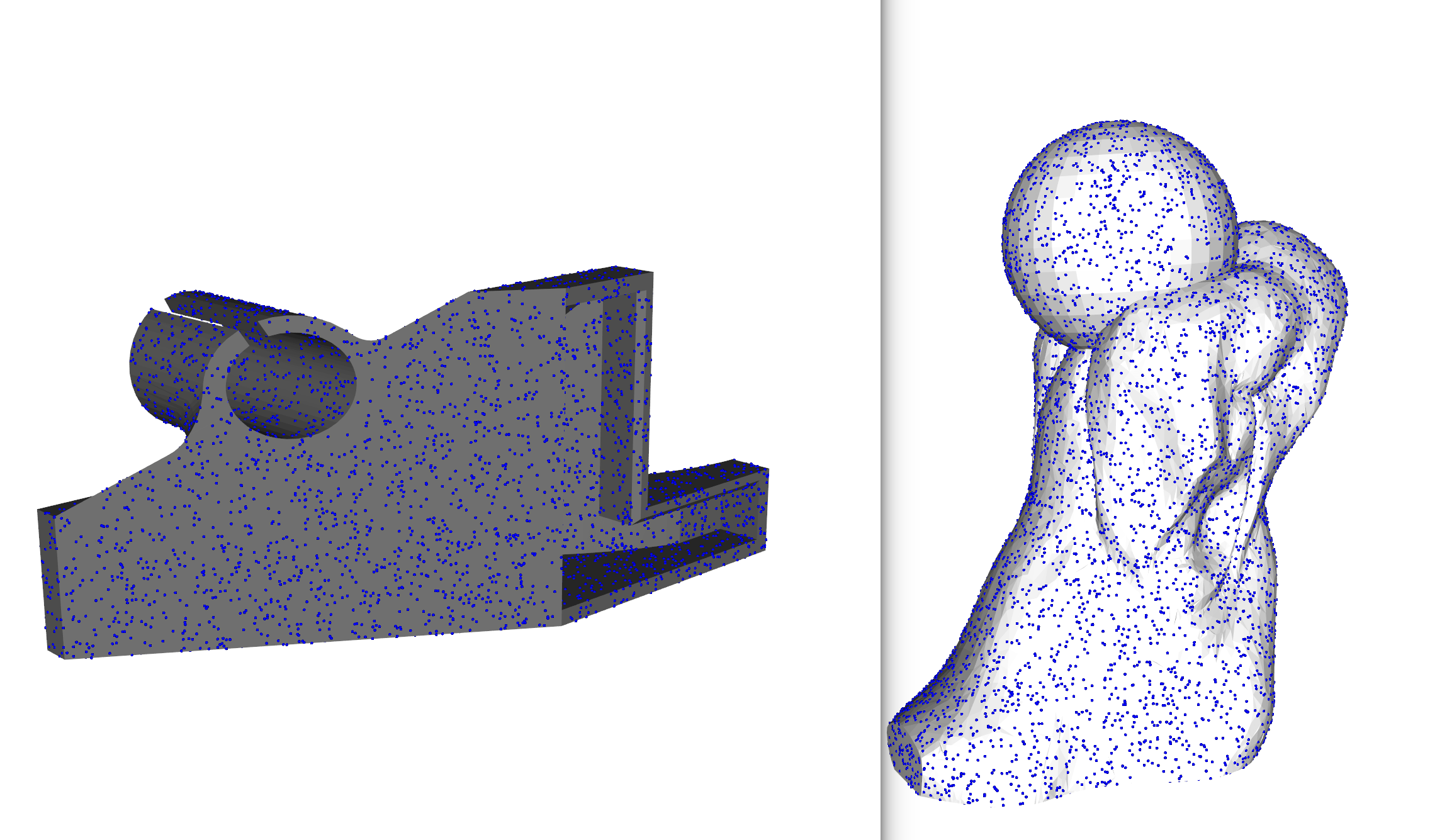
- Planning
We recover the pose by really naive algorithm, choose the best sampling points and calculate the pose then visualize it.
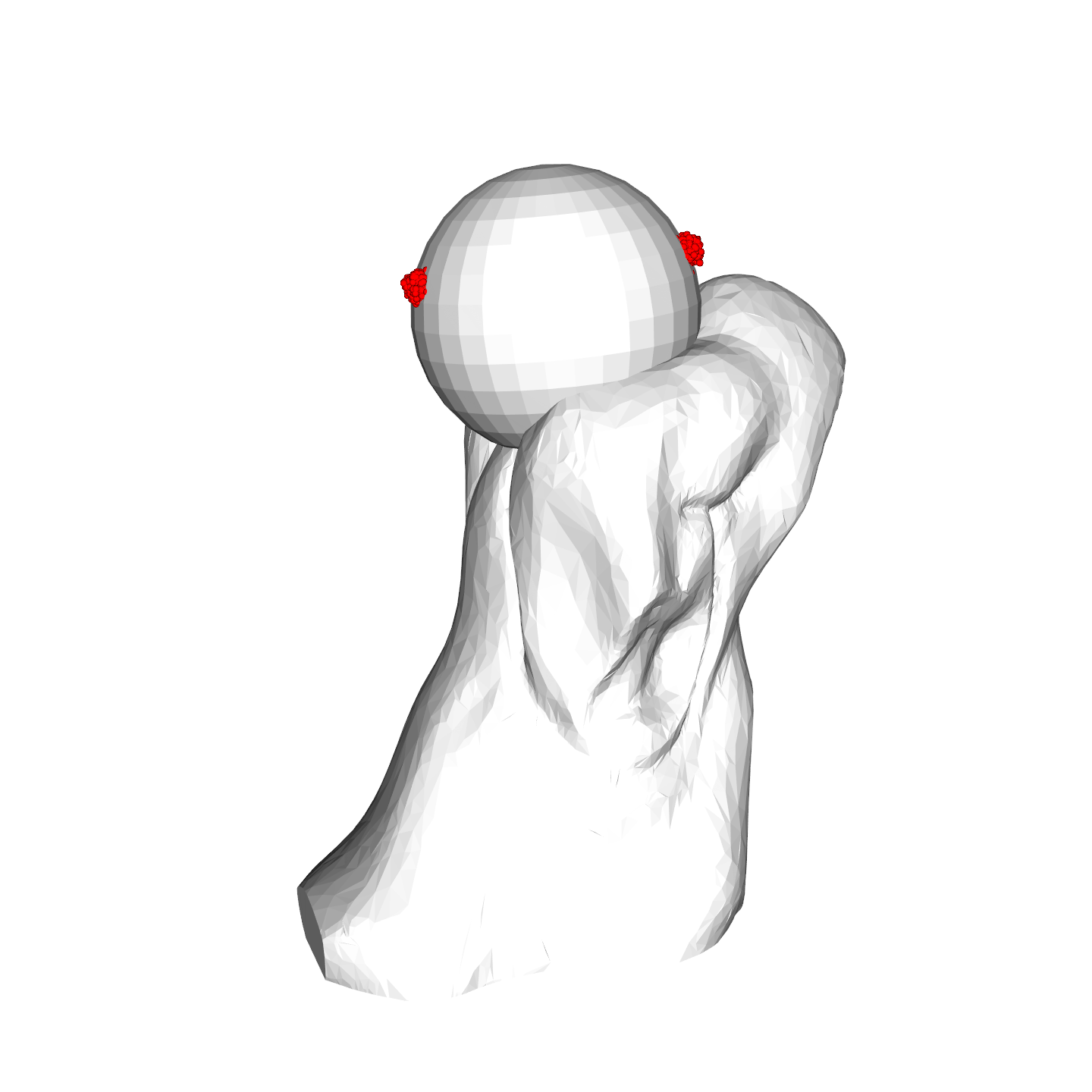
- Sampling
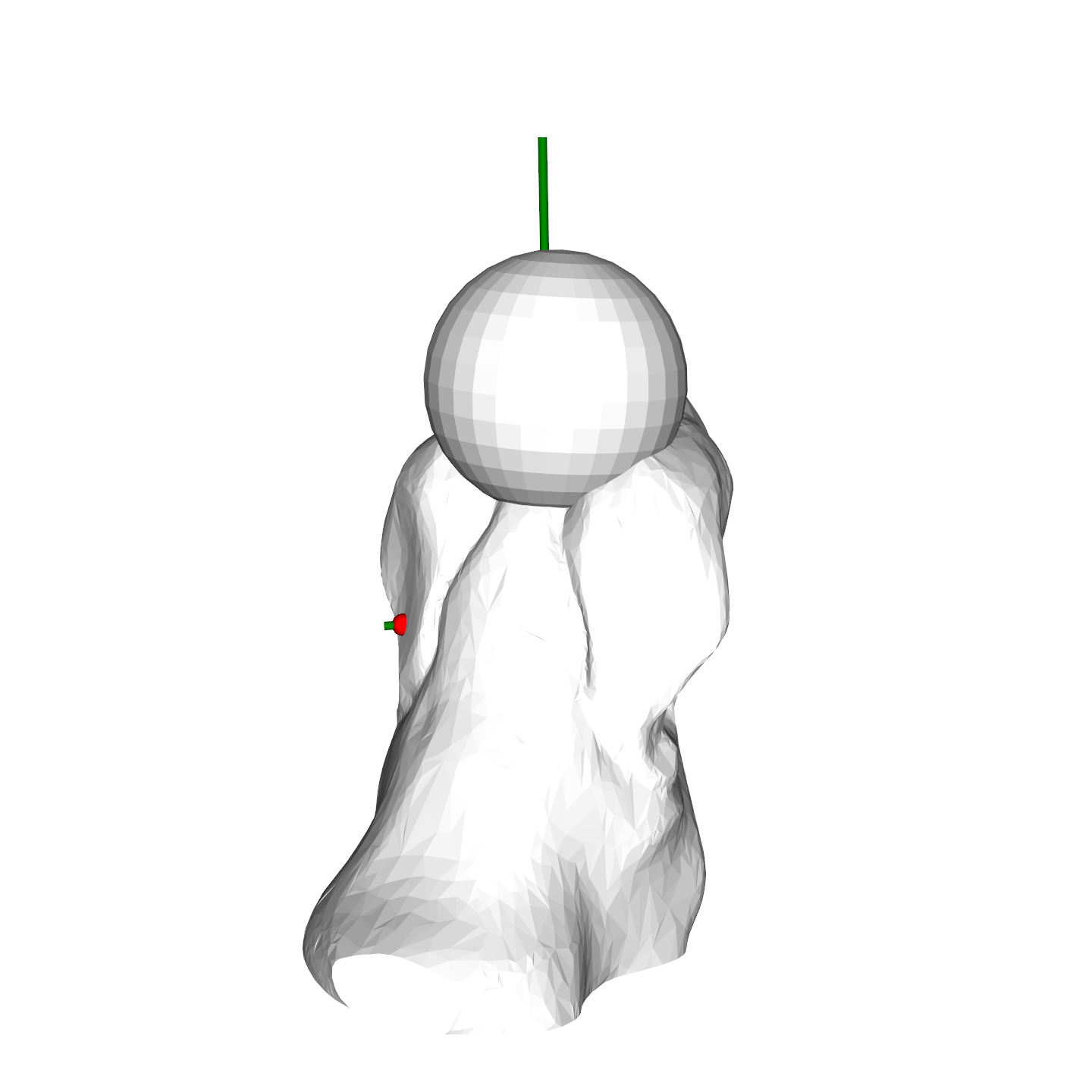
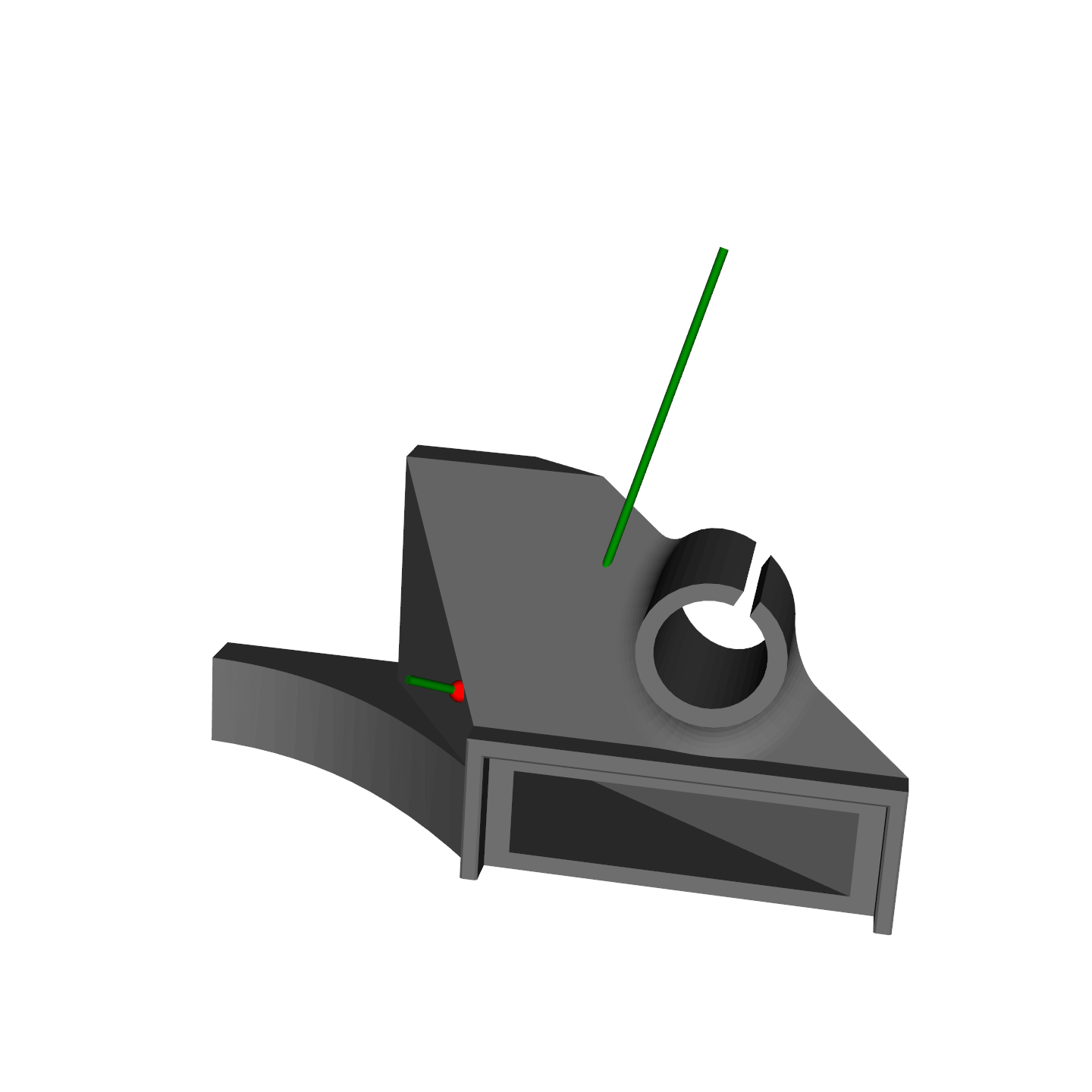
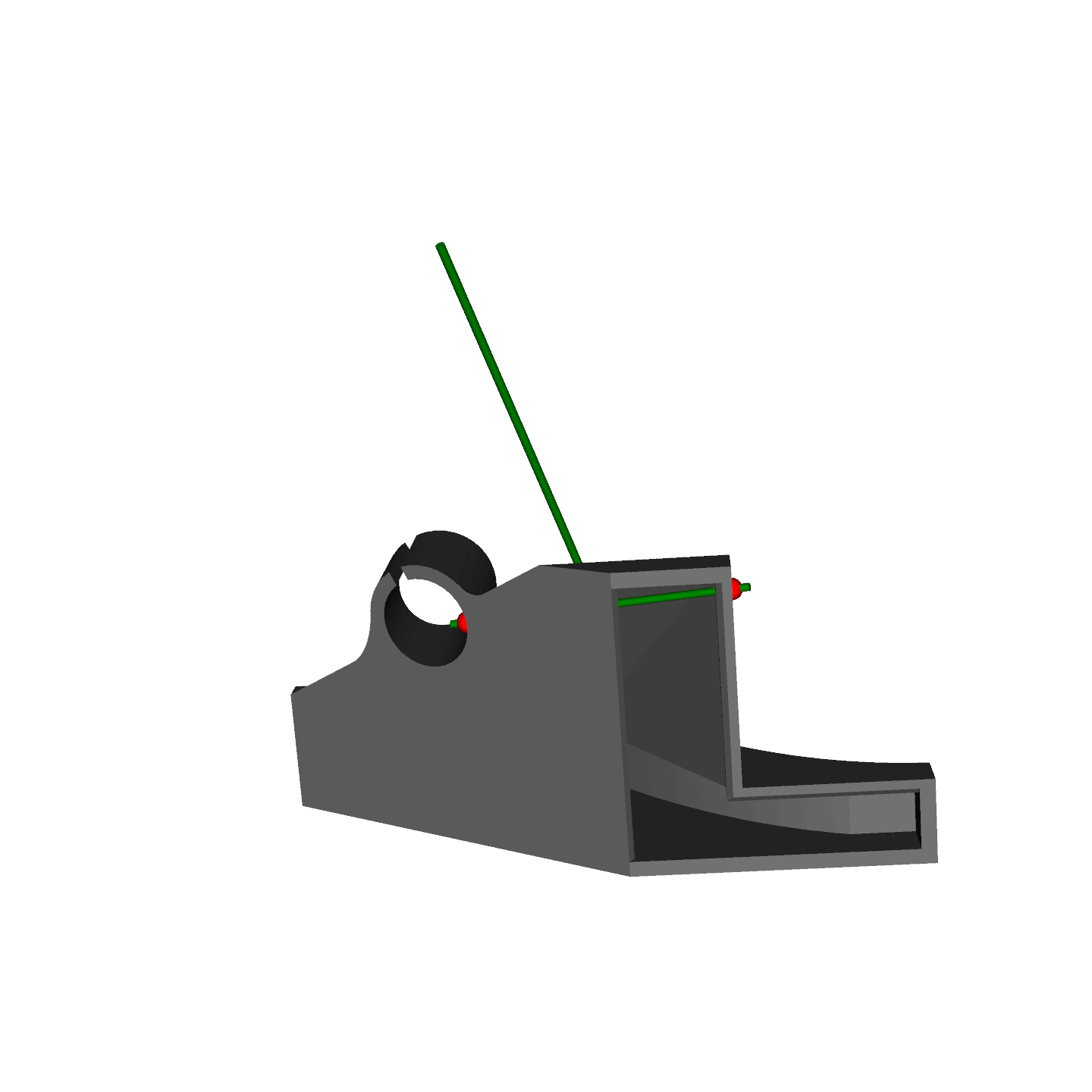
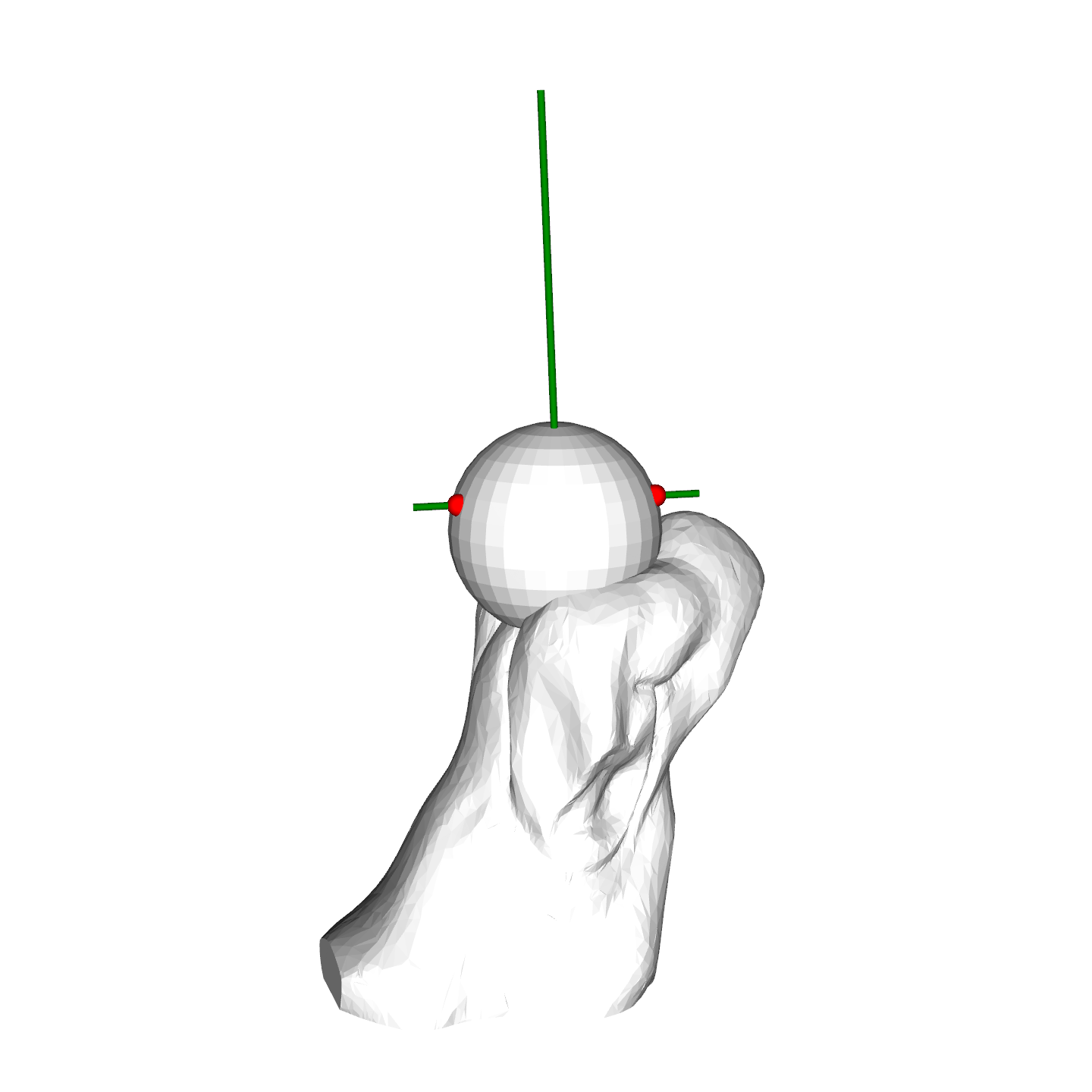
| Nozzle | Pawn |
|---|---|
 |  |
 |  |
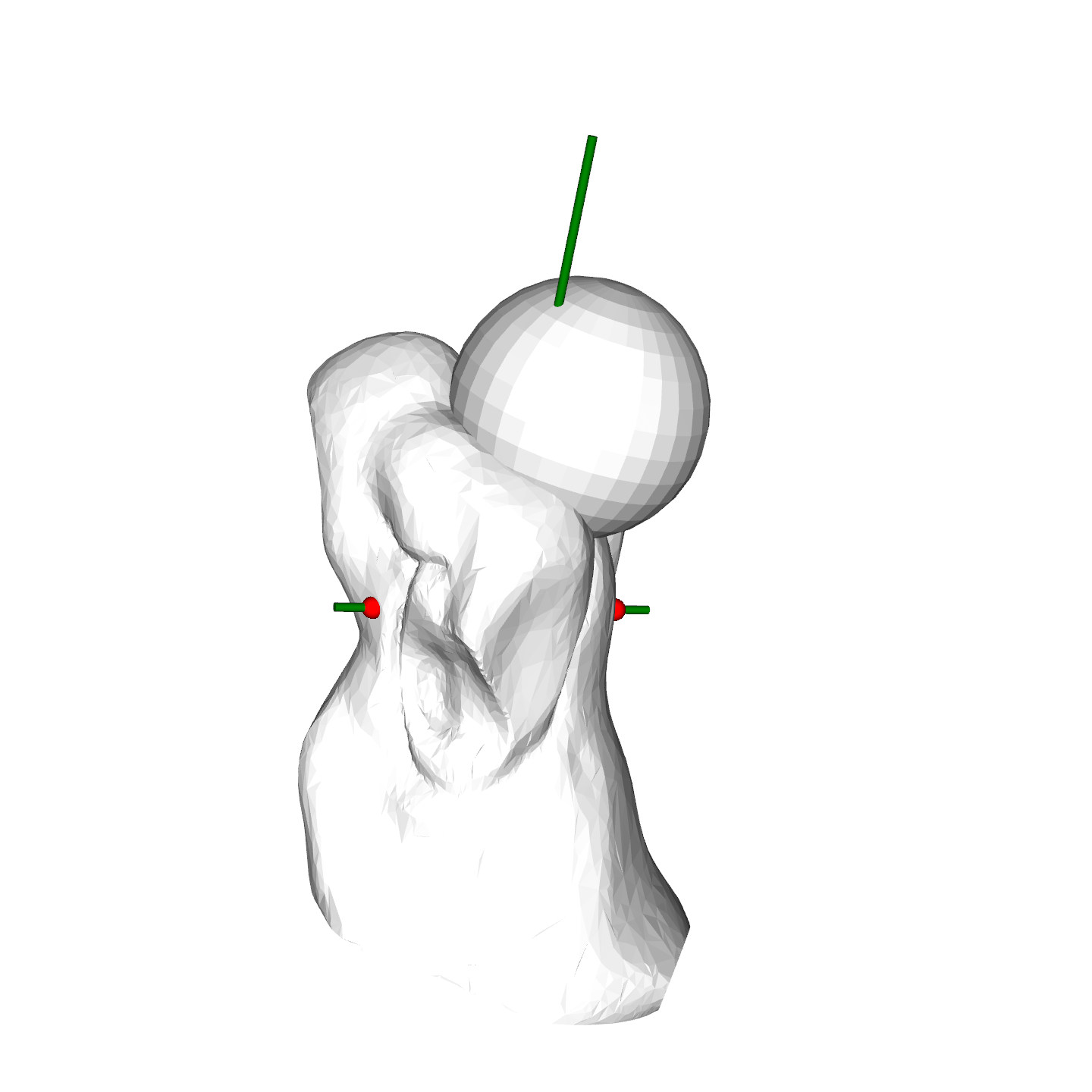 |  |
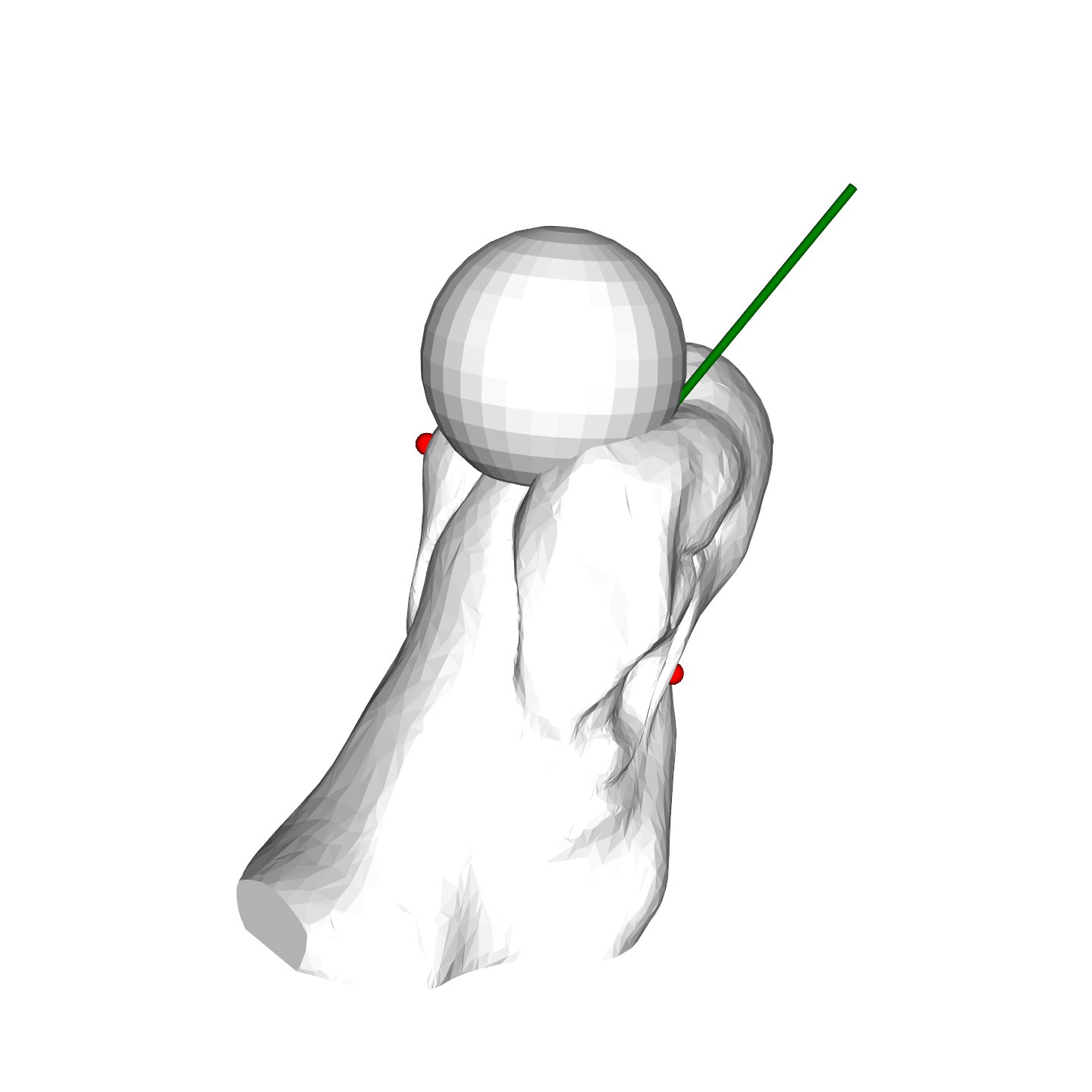
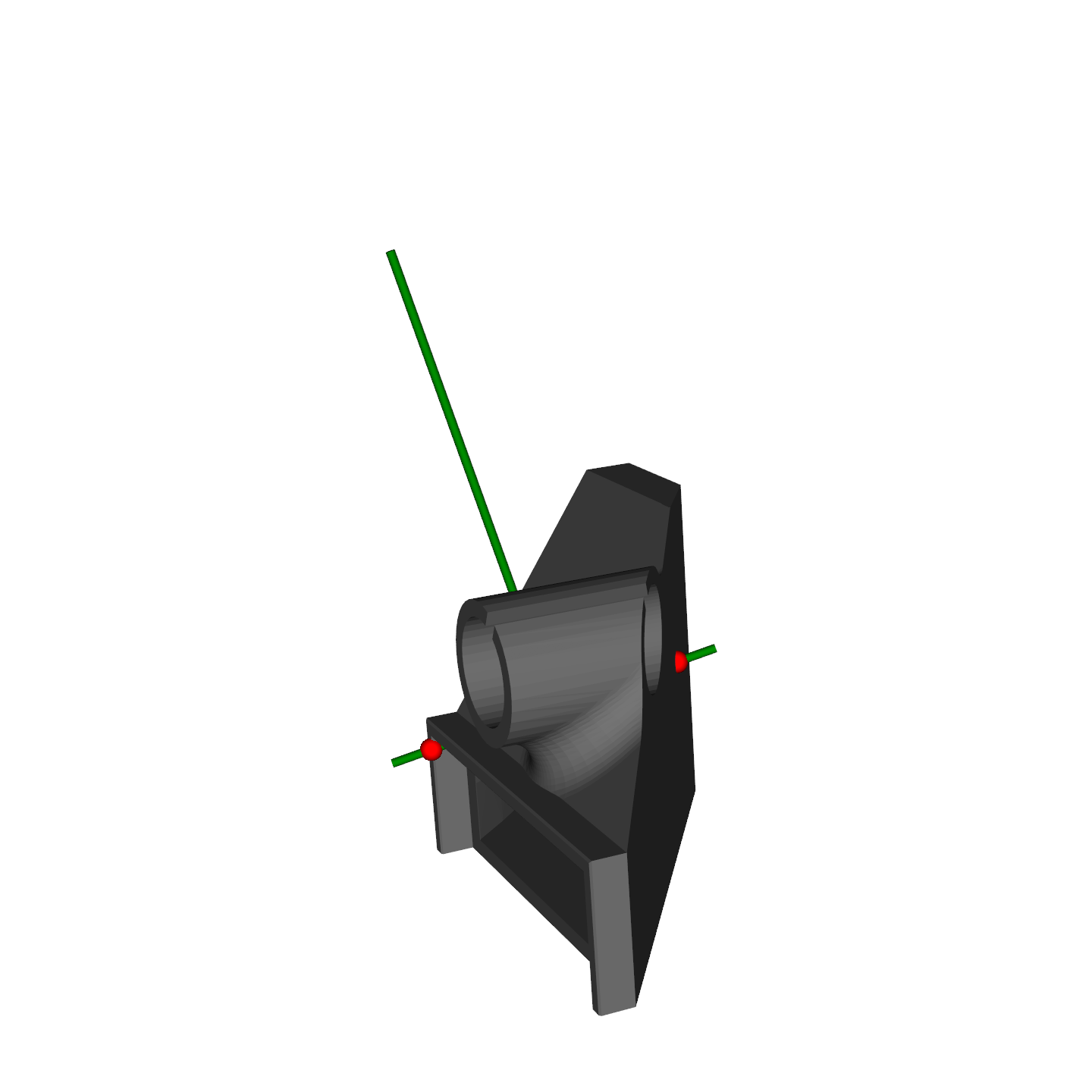
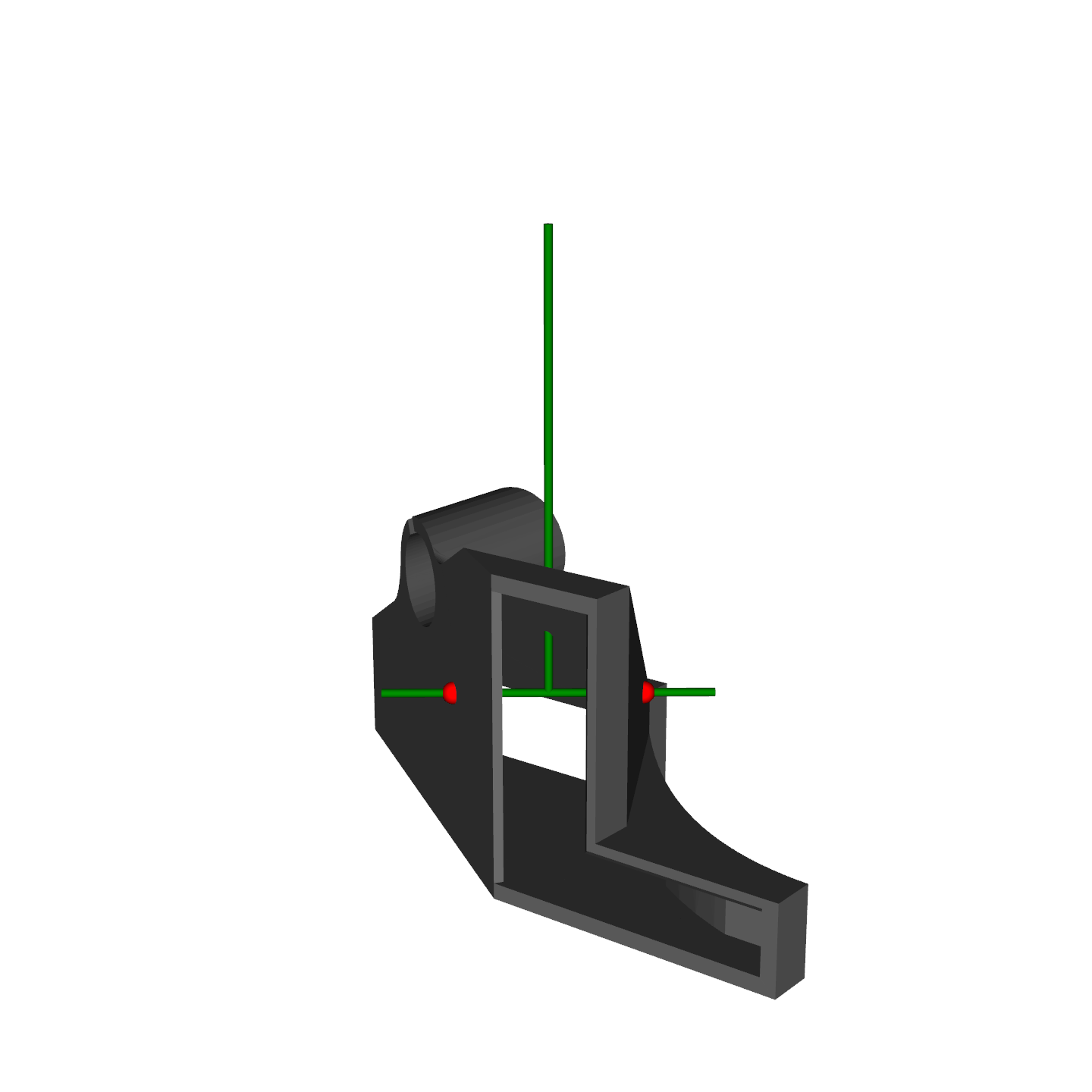
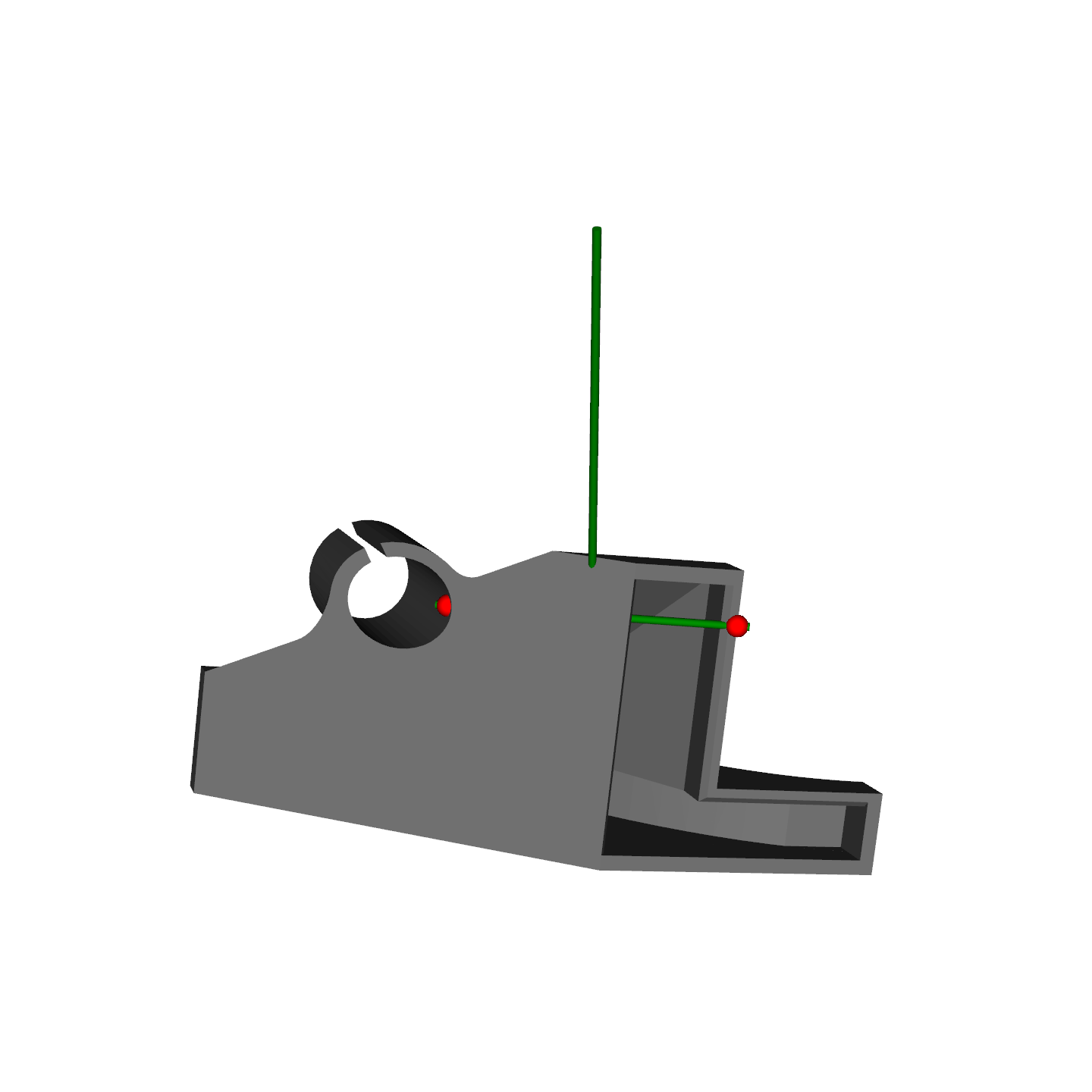
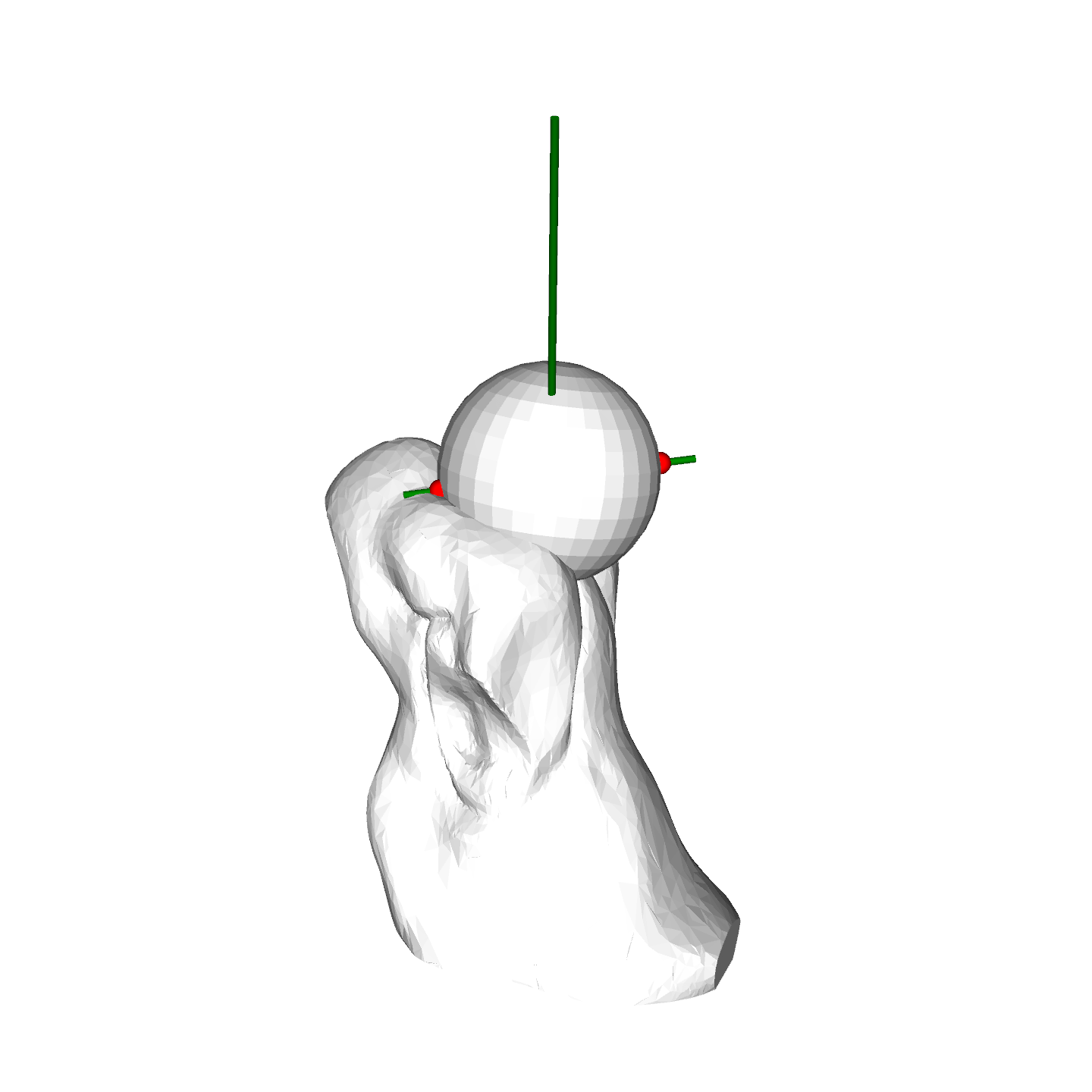
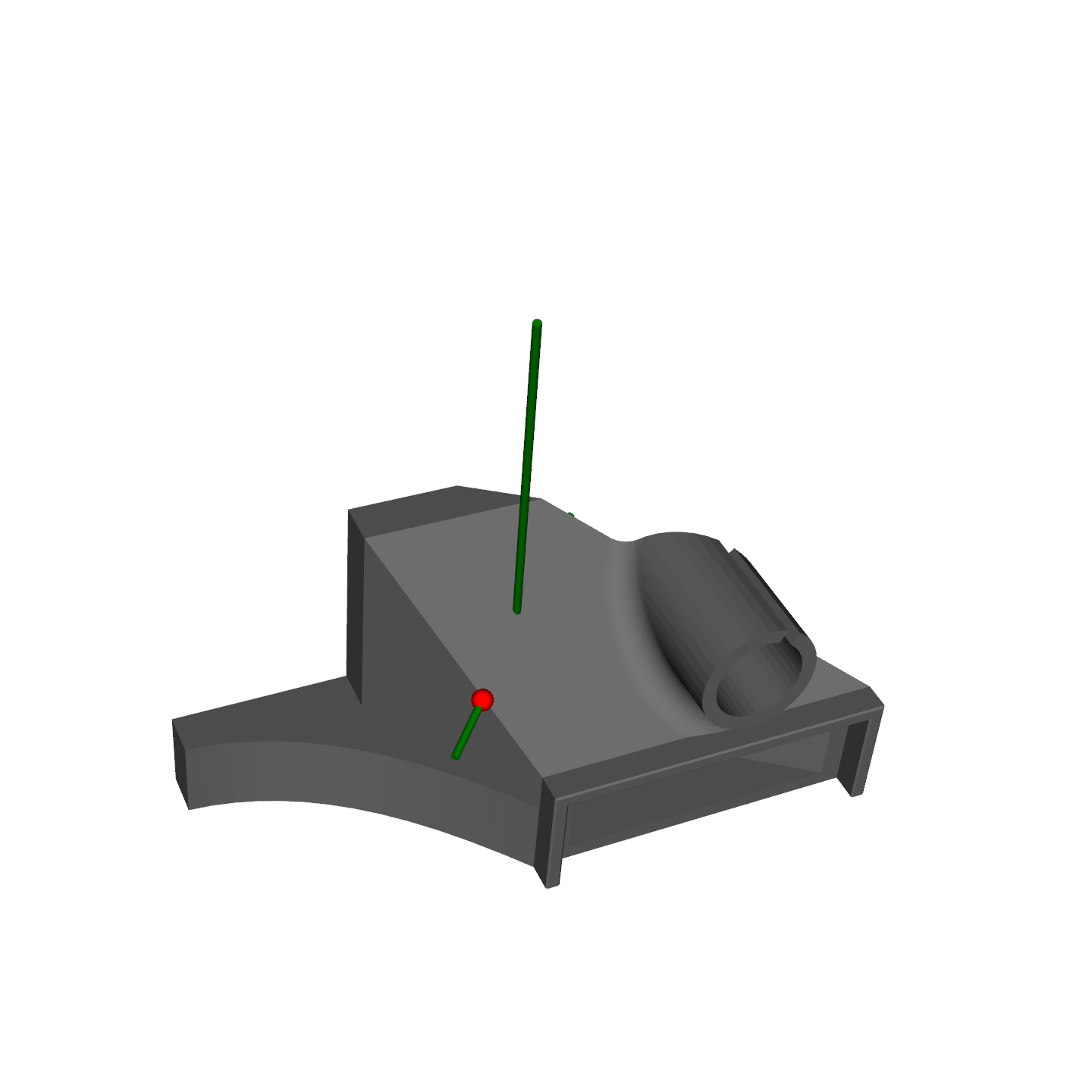
- Given Grasp:
| Nozzle | Pawn |
|---|---|
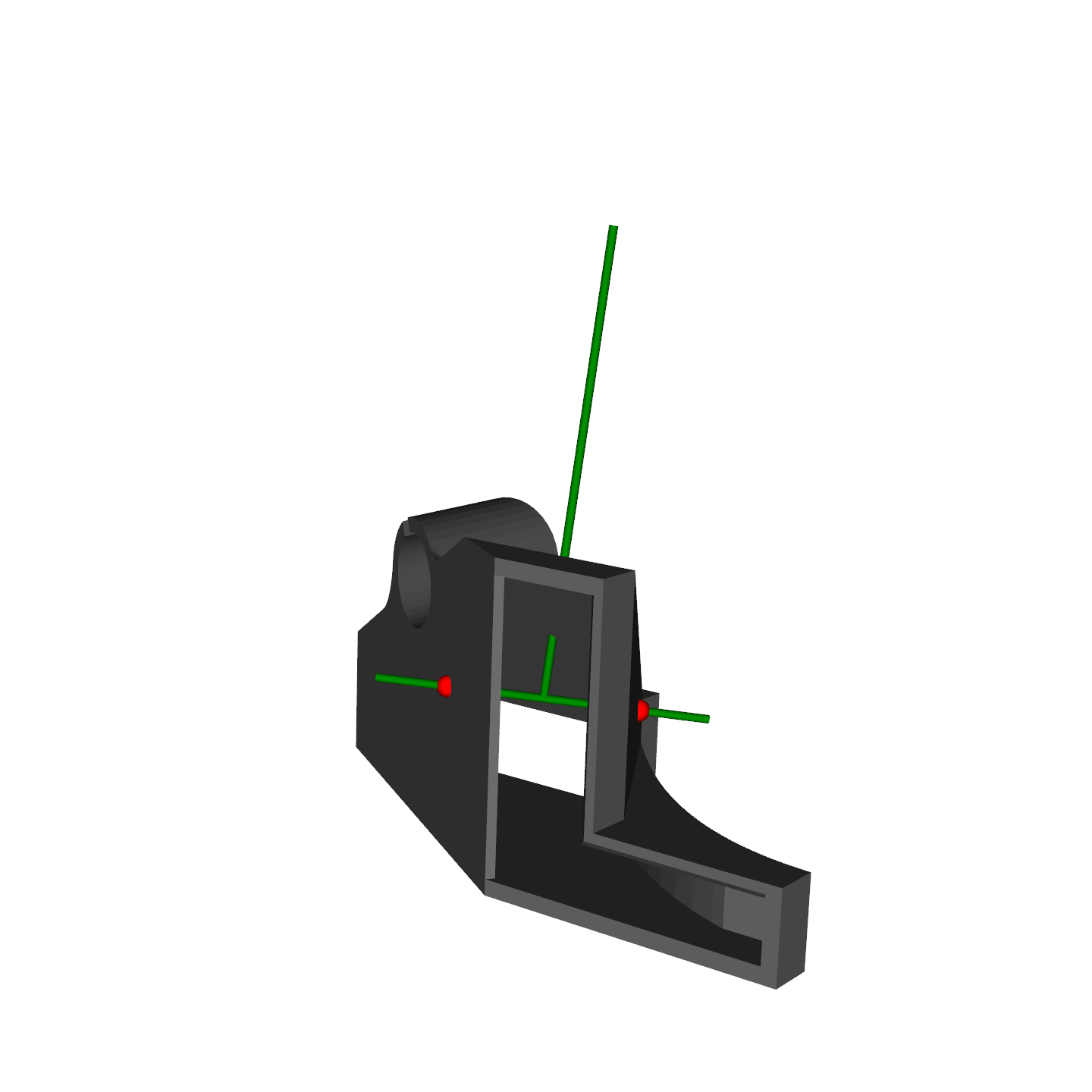 |  |
 |  |
 |  |
 |  |
 |  |