Wenzhe Tongwenzhet [at] umich.edu I'm a 1st year PhD student of Robotics at UMich advised by Prof. Xiaonan Huang and Prof. Maani Ghaffari. I earned my M.S.E degree at UMich advised by Prof. Maani Ghaffari. Previously I exchanged at UC Berkeley advised by Prof. Koushil Sreenath. I worked on path planning algorithms for leash-leaded Human Robot Interaction system in Hybrid Robotics Lab. Apart from study, I'm an aerial photographer and also a PRO R/C drone driver with more than 5-yrs experiences. Also I love extreme sports, especially snowboarding, surfing and skateboarding. CV | GitHub | Google Scholar | LinkedIn |

|
News
|
Research
|
Proprioceptive Invariant Robot State Estimation.Tzu-Yuan Lin, Tingjun Li, Wenzhe Tong, Maani Ghaffari [Project page] [Paper] [Video]
|
|
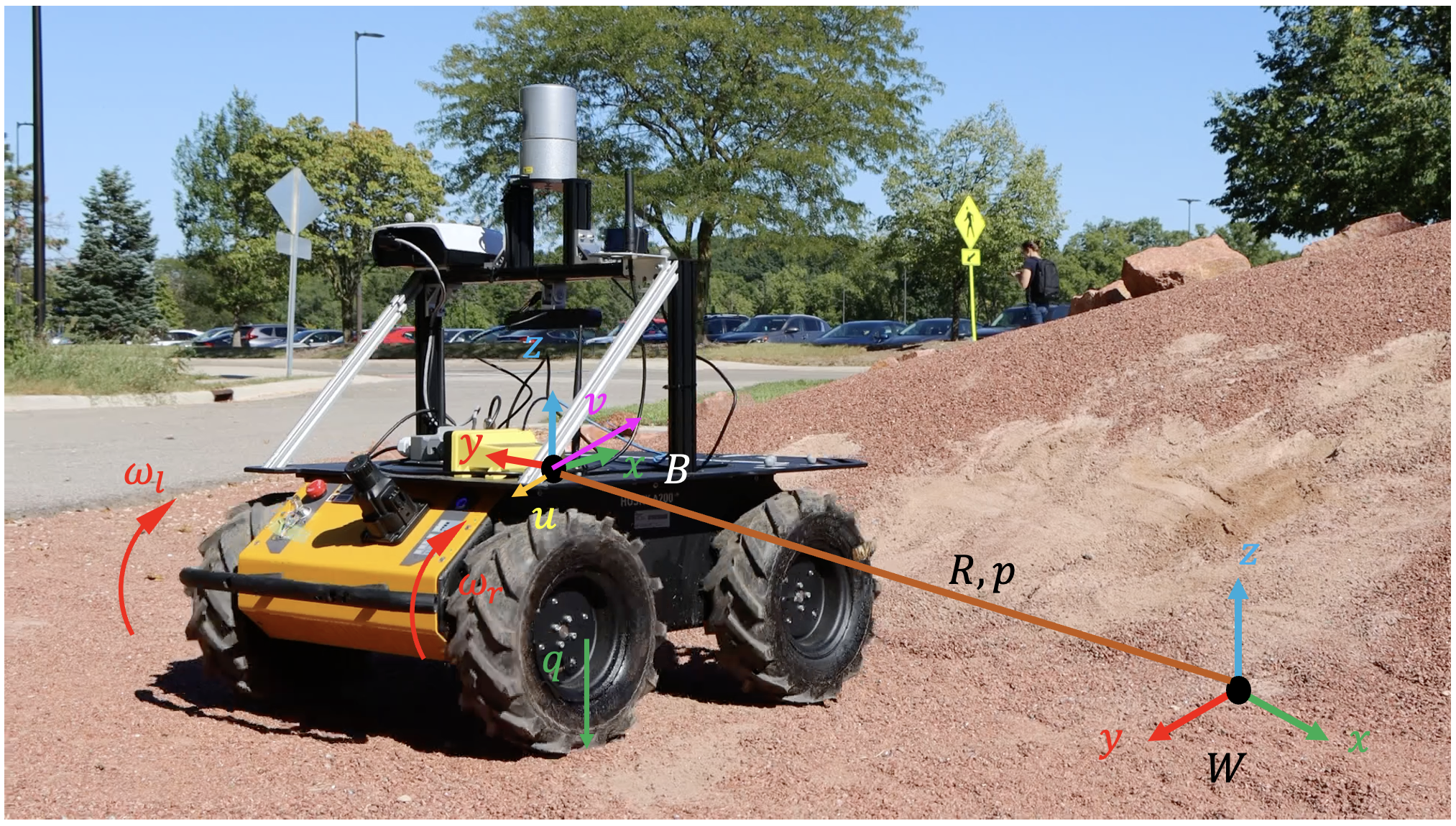
Fully Proprioceptive Slip-Velocity-Aware State Estimation for Mobile Robots via Invariant Kalman Filtering and Disturbance Observer.Xihang Yu, Sangli Teng, Theodor Chakhachiro, Wenzhe Tong, Tingjun Li, Tzu-Yuan Lin, Sarah Koehler, Manuel Ahumada, Jeffrey M. Walls, Maani Ghaffari IROS 2024 [Paper] [Video]
|

|
Robotic Guide Dog: Leading a Human with Leash-Guided Hybrid Physical Interaction.Anxing Xiao*, Wenzhe Tong*, Lizhi Yang*, Jun Zeng, Zhongyu Li, Koushil Sreenath ICRA 2021 | ICRA Best Paper Award Finalist for Service Robotics [Paper] [Video] We propose a hybrid physical Human-Robot Interaction model that involves leash tension to describe the dynamical relationship in the robot-guiding human system. This hybrid model is utilized in a mixed-integer nonlinear programming problem to develop a reactive planner that is able to utilize slack-taut switching to guide a blind-folded person to safely travel in a confined space. |
Projects
|
RRT path planning for PR2 robotEECS498-Introduction to Algorithmic Robotics(Fall 2021) Using RRT-connect algorithm to search feasiable path, then shorten and smoothen the path to the target point. |
|
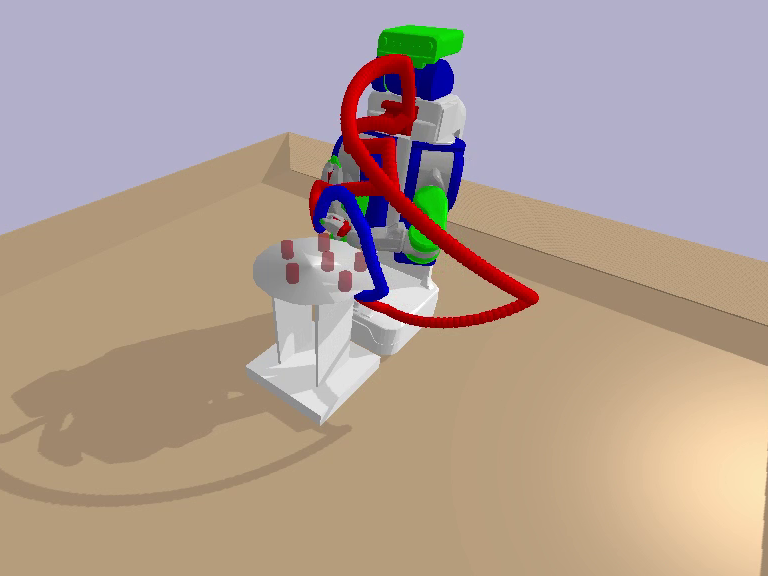
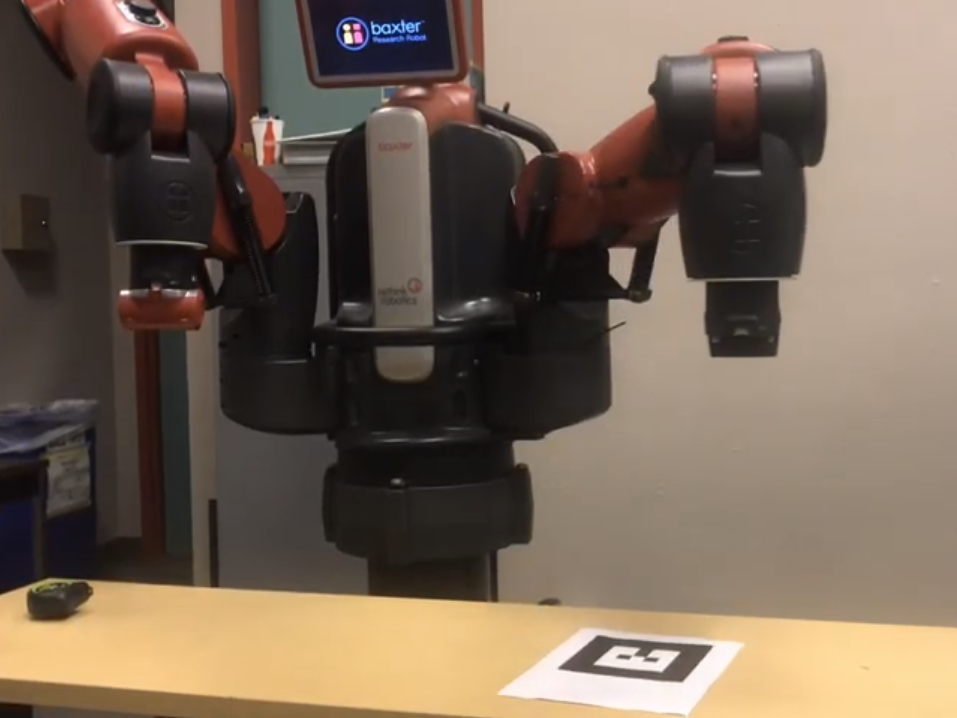
Control, RL, Grasp planning for 7-DOF Baxter robotEECS106B-Robotic manipulator and interaction(Spring 2020) [Project page] [Video] Based on 7-DOF robot Baxter, we designed workspace position, joint angle and joint torque controller for the robot; then using reinforcement learning to get parameters for our controller. Also designed grasping algorithms for bi-finger gripper. |
|
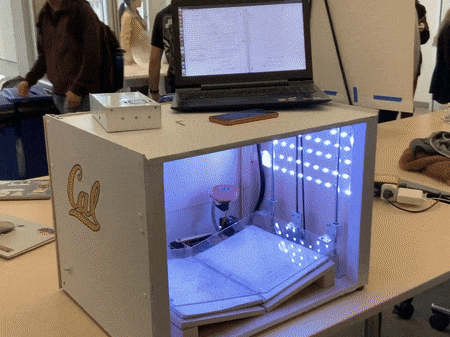
Automatic book scannerME102B-Mechatronics Design(Fall 2019) [Video] Compelete 3D model design in SolidWorks; manufactured parts of the scanner by 3D printing and laser cutting. Integrated electronics components with proper specifications in the scanner; implemented controller in ROS with camera image processing. |

|
Auto-aiming pellet launcher quadcopterRobomaster National Robotics Competetion, University Championship Designed and analyzed the light-weight quadcopter structures. Integrated electronical control systems for the payload gimbal. Developed target aiming algorithm framework, including detection and tracking with OpenCV. |
|
Last update: Mar 1st, 2024 |